





CSMIO-ENC is a module for position, speed and angle reading from three incremental encoders compliant with the RS422 standard. It was designed to operate spindles (together with an encoder mounted on a spindle, it creates an independent measuring system, providing precise data for CNC control software).
The data, depending on the capabilities of your control software (simCNC/Mach3/Mach4), can be used, for example, to read the current spindle speed, threading or spindle positioning. The CSMIO-ENC module works only with 6-axis motion controllers CSMIO / IP-S and CSMIO/IP-A.
The Main Advantages
- Easy configuration, limited to encoder pulses number and counting direction settings.
- Safety system – CSMIO-ENC module is equipped with many functions that protect the threading process. The most important are:
– Protection against too low Z-axis parameters for threads with a large pitch or in case of threading with the fast rotation speed of a spindle.
– Protection against an incorrect direction of spindle revs for M3 or M4 command. - Solid aluminum housing which dissipates heat and protects electronic circuits very well. Readable led controls on a front panel which make it easier to install and simplify diagnostics in case of any problems with encoders.
- Additional features:
– two other encoder inputs that can be used for example for glass scales position reading using scripts.
– positioning (indexing) of a spindle to demanded angle set in plugin (a function very often used in lathes with manual holder) or to any angle via scripts. To make it possible we should use a servo drive for spindle driving (its features must be the same as in case of servo drives mounted on axes X, Y, Z…..). - Industry standard
– CSMIO-ENC module is adapted to work with encoders resistant to the industrial environment concerning interference what means that you should use encoders with differential, incremental signal TTL 5V. It’s possible to use non-differential encoders however only using differential line transmitter (available in CS-Lab store).
– the module powering is adapted to 24V DC
![]()
General & Main Features
Operation stability
Provided by connection of the CSMIO-ENC module with a CSMIO/IP controller through CAN bus. It guarantees correct and fast transmission even in a tough industrial environment. The great advantage of CAN bus is resistance to interference also in case of much distance between devices, the resistance is assured by differential transmission and CAN bus termination (120 Ohm resistor at the beginning and the end of the CAN bus). Another advantage of the CAN bus is the ability to detect collisions and data loss by the strict control of the transmission.
Using differential line for pulses transmission between an encoder and the module is also crucial matter. It provides resistance to interference and lets us achieve high signal frequencies.
Easy installation
CSMIO-ENC requires encoder connection (encoder mounted on a spindle, ratio 1:1, precise and solid installation is required), power supply and CAN bus. If direct installation of an encoder on a spindle isn’t possible you can use accurate backlash-free gearbox as gear wheels with a toothed belt (read more in CSMIO-ENC manual). After mechanic and electric assembly, we should also remember about encoder pulses number setting (including all four edges) and pulses counting direction (read more in CSMIO-ENC manual).
*In case of Mach3, these settings must be done in the plugin („Spindle” tab), with other software in a place intended for this.
![]()
How does it work?
CSMIO-ENC, after machine start, spindle activation, and Index signal detection, starts reading from an encoder, in example spindle position, angle and speed. The data is transferred by CAN bus to a CSMIO/IP motion controller, where they are used for Z-axis synchronization from spindle position during threading or only for spindle speed reading.
![]()
Purpose
CSMIO-ENC module is recommended to users/companies, who:
- retrofit original CNC machines and want to restore their threading functionality by using an encoder originally mounted on a spindle.
- build new machines and want to expand their functionality by implementing precise threading so far available only in original CNC machines.
CSMIO-ENC module can be successfully used in lathes and milling machines, which spindle is driven as well by a servo drive as by a VFD.
In The Box
 In the CSMIO-ENC module package you will get:
In the CSMIO-ENC module package you will get:
- 1x DB25 ribbon wire
- 1x DB9 ribbon wire
- 1x DB25 connector -> terminal block.
- 1x terminator
![]()
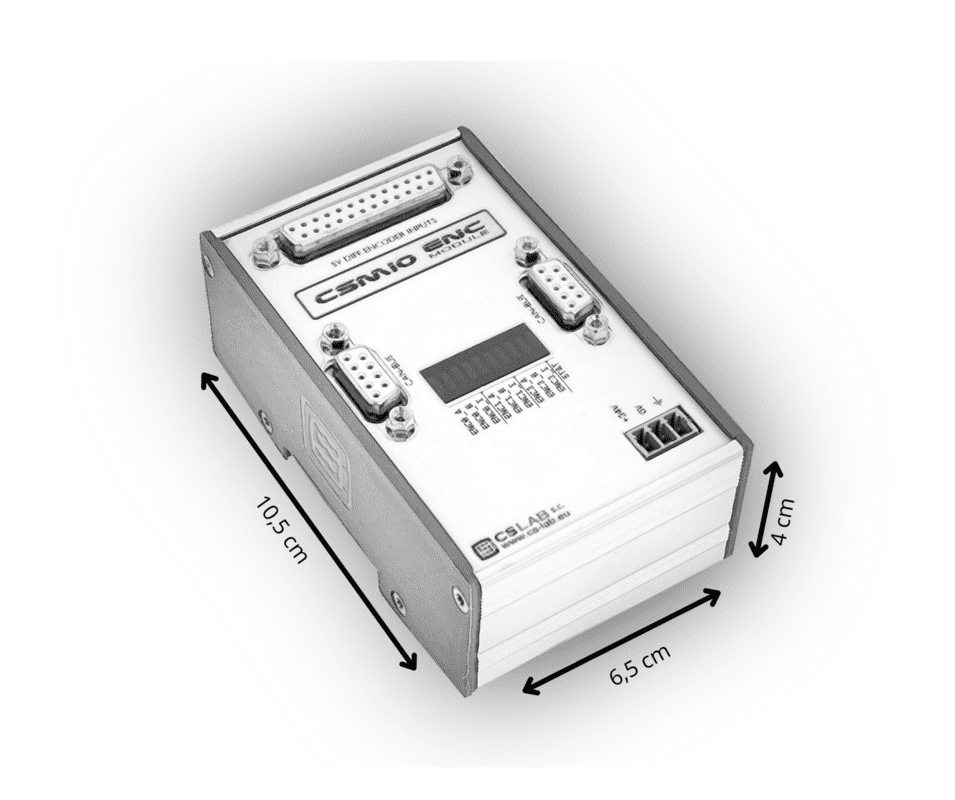
CSMIO-ENC Dimension

![]()




