



Connection diagram of CSMIO/IP-A controller and TRIO DX3 driver (documentation) with various of software.

Search in Products
Sort Schematics and Articles by Motion Controller:
Connection diagram of CSMIO/IP-A controller and TRIO DX3 driver (documentation) with various of software.
Connection diagram of the CSMIO/IP-S controller with the simCNC software and T3D drives (documentation)

The connection diagram presents CSMIO/IP-S motion controller with DELTA B2 servo drives and simCNC software. Includes limit switches and gantry.

1. Connection diagram of CSMIO/IP-S controller, simCNC software and JMC JAND driver (documentation) Open the PDF...

Connection of CSMIO/IP-S and Sinovo VFD with various CNC software.
Here we present the connection diagram for CSMIO/IP-S controller, simCNC software and AASD 30A drivers Open the PDF...

Connection diagram of the CSMIO/IP-S controller, simDrive 400V, 750V servo drive (v2) and Mach4 software

How many lines of gcode does simCNC analyse in advance? How many lines look ahead can we set? This question has...

Preparing a computer for the installation of simCNC, Mach3 and Mach4 Below is a list of activities that should be done...
The connection diagram presents CSMIO/IP-S motion controller with DELTA A2 servo drives and simCNC software. It includes version with limit switches.
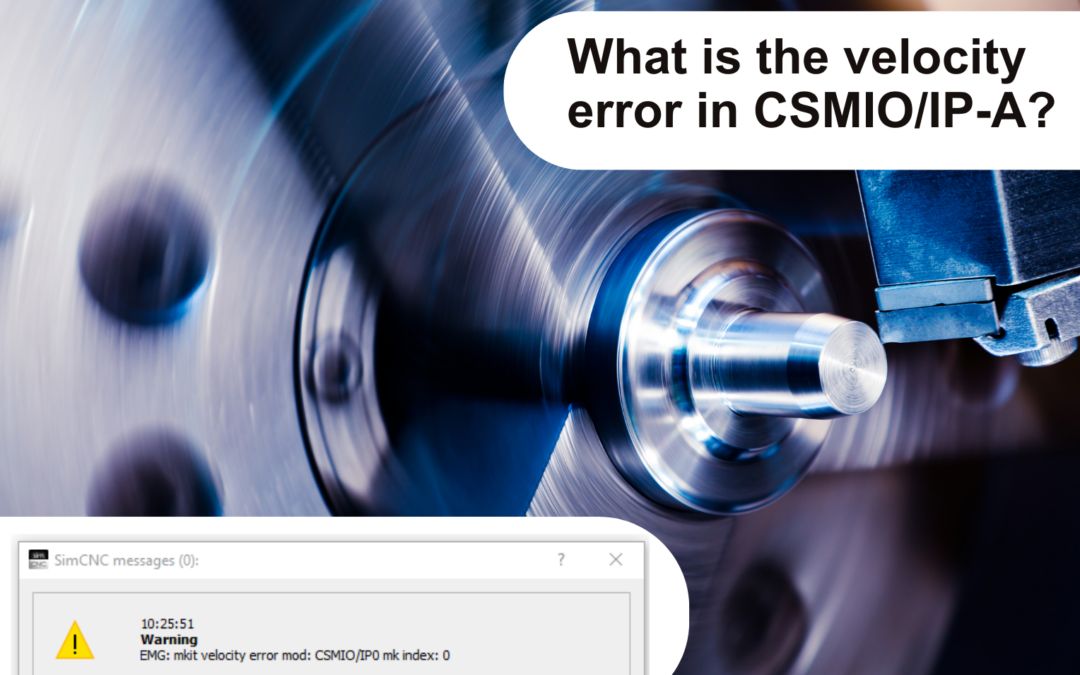
What is the Velocity Error in CSMIO/IP-A? This message means there is too significant a difference in speed between...
Follow the CS-Lab Forum thread to learn more about the topic described below. You can test the analog...
Click one of our contacts below to chat on WhatsApp
