



If you have not used the simCNC 3.410 so far, backup your profile before installing it, because the simCNC 3.410 profile is incompatible with earlier simCNC versions.
Search in Products
Sort Schematics and Articles by Driver:
If you have not used the simCNC 3.410 so far, backup your profile before installing it, because the simCNC 3.410 profile is incompatible with earlier simCNC versions.

Tapping in Mach4 works in a different way than Mach3. Mach3: M84 is rigid tapping, and it is done only by a CSMIO/IP motion controller as a fully autonomous feature. During rigid tapping in Mach3, the Z-axis position is synchronized with a current spindle position....

We present the next connection diagrams of our controllers with other devices. In the article below you will learn how to properly connect the CSMIO/IP controller to the A2 VFD based on three control software (simCNC, Mach3 and Mach4).
The E-PID error is caused by a significant difference between the set position of the control software and the actual position of the controller.

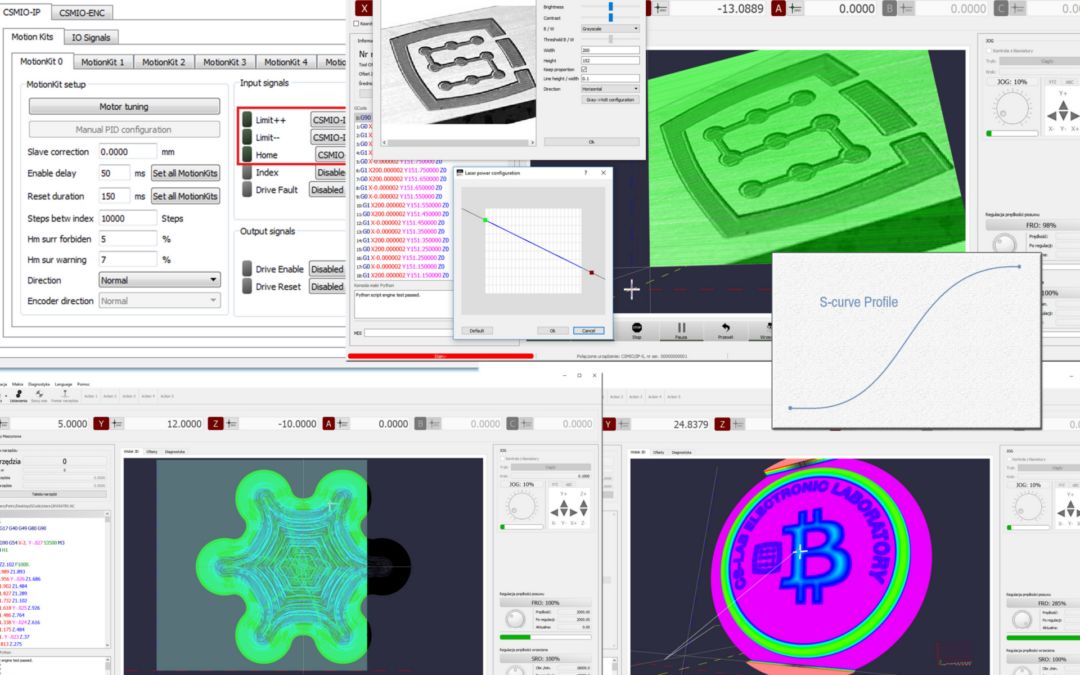
In the case of CSMIO/IP controllers, the measurement start-up procedure looks a bit different from the original solution using the LPT port. Below you will find information on how to perform a surface scan step by step, i.e. create a grid of points using a measuring probe using Mach3 software and a CSMIO / IP controller.

Diagram for two types of connection THC Analog Smart and Digital
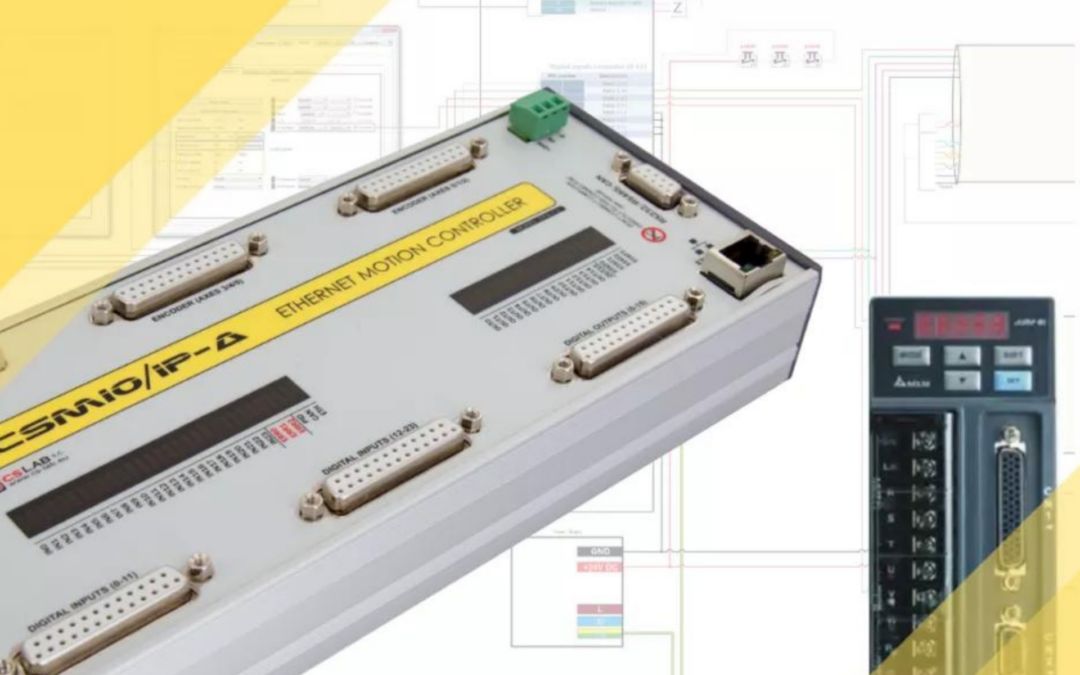
Take a look at the latest diagram prepared by our technical department. You will learn how to properly connect a CSMIO/IP-A controller with a DELTA driver.
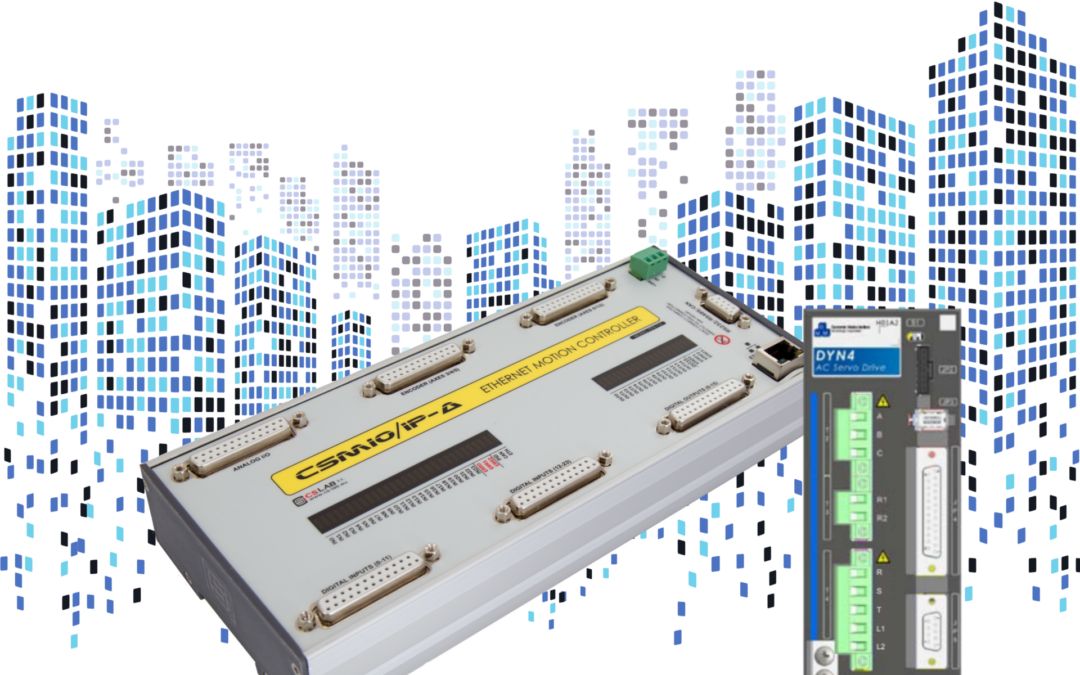
Our technical department has prepared new diagrams for connecting the CSMIO / IP-A controller. This time with the DYN4 driver.

If you suspect you are having interference noise, the first thing is to determine which element is affected and how the noise gets to it.
Connection diagram of CSMIO/IP-A controller with CD1-A INFRANOR drive with simCNC and Mach4 software.
Click one of our contacts below to chat on WhatsApp
